




















AquaBot – A Success Story in Autonomous Underwater Robotics
2025-02-23
Share:





AquaBot: A Pioneer in Autonomous Underwater Robotics Powered by FIFISH V-EVO
United States · 2024
Background & Challenges: Advancing Autonomous Underwater Operations
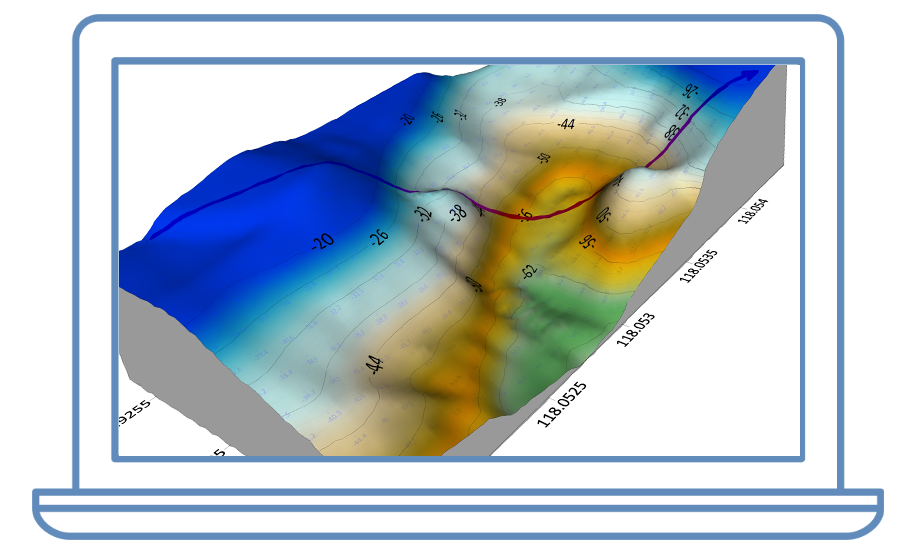
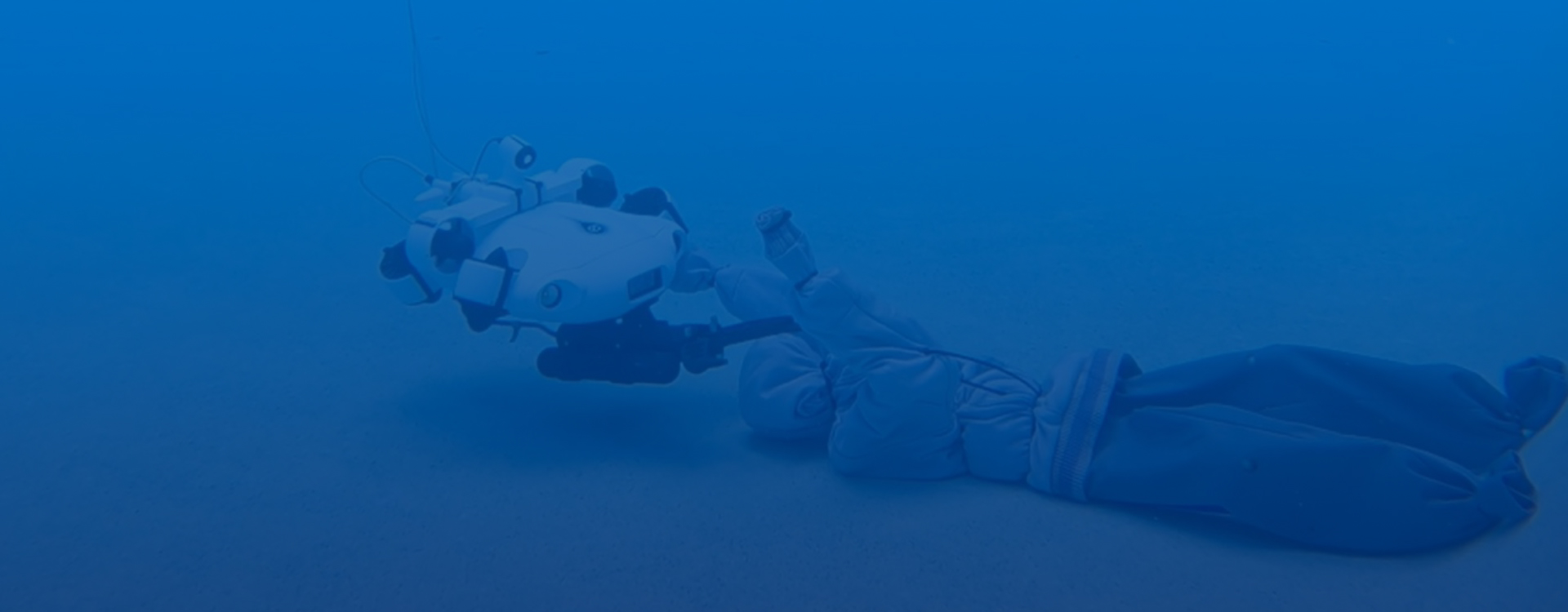
Autonomous underwater robots represent the future of ocean exploration, but the complexities of underwater environments continue to pose significant challenges. Research teams from Columbia University, Stanford University, and the University of Notre Dame aimed to tackle the difficulties of navigation and operation in turbulent currents, low-visibility conditions, and dynamic fluid movements. To translate their research in robotics, artificial intelligence, and computer vision into real-world applications, they required a reliable and precise platform.


Solution: FIFISH V-EVO Integrated with Cutting-Edge Technologies
The research teams selected QYSEA’s FIFISH V-EVO as the ideal platform to advance autonomous underwater exploration:
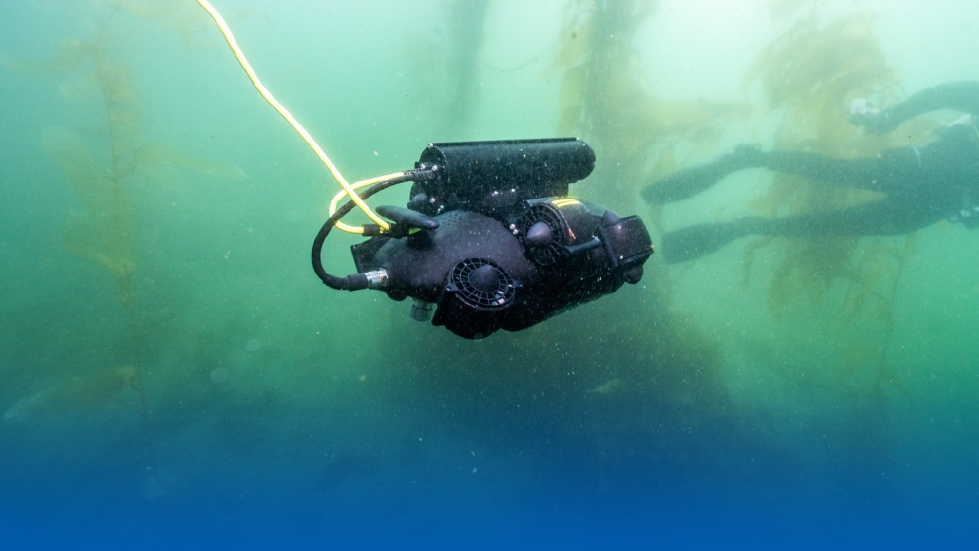
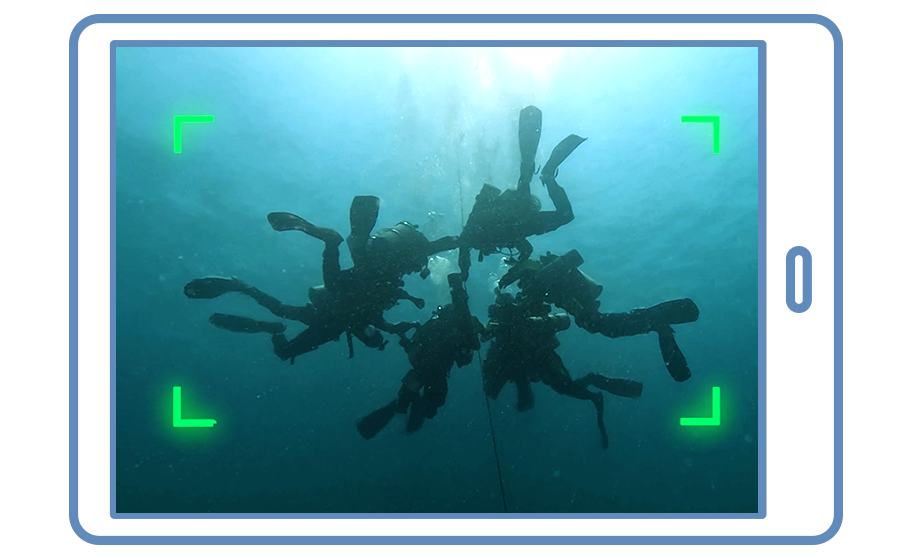
· Omnidirectional Precision Mobility: V-EVO’s 360° maneuverability enables AquaBot to maintain stable autonomous navigation and positioning, even in strong currents.
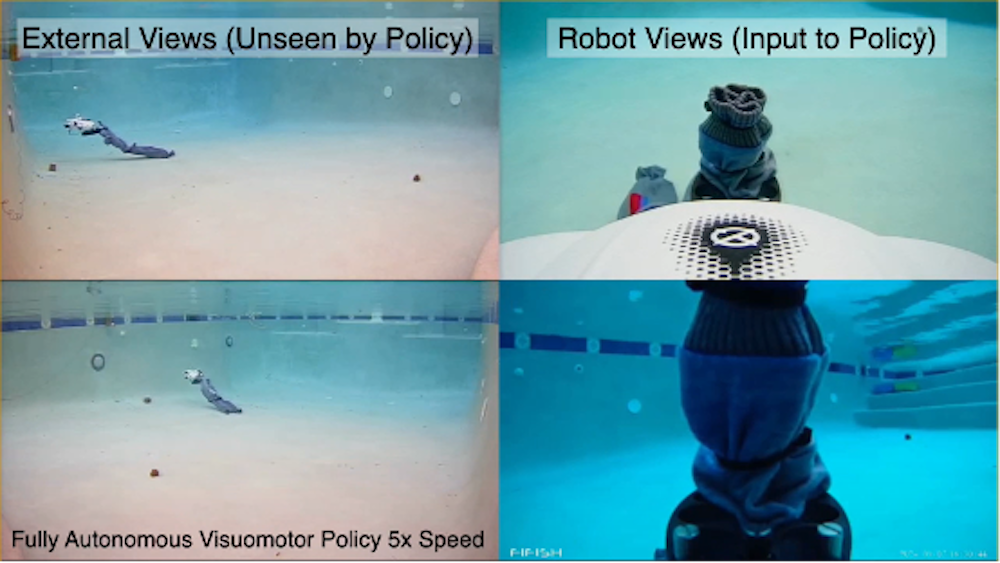
· High-Resolution Visual Data Capture: Equipped with a 4K ultra-HD camera and dual 5,000-lumen LED lights, the system allows AI vision algorithms to process clear, real-time image data even in murky conditions.
· Rugged and Reliable Structural Design: With the ability to operate at depths of up to 100 meters, V-EVO ensures long-term stability and durability for autonomous underwater missions.
Breakthrough Results: Enhancing Efficiency and Intelligence
Leveraging the FIFISH V-EVO platform, AquaBot has successfully achieved a high level of autonomous underwater operation:
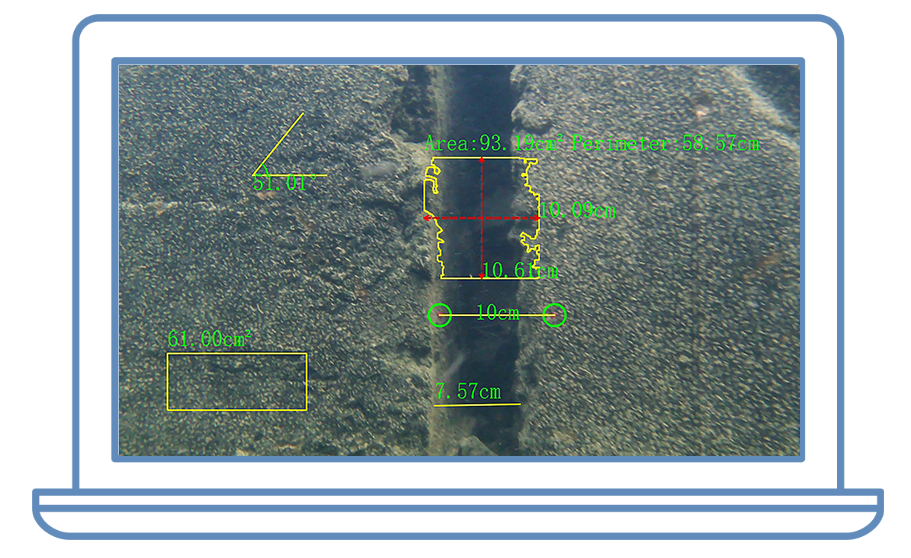
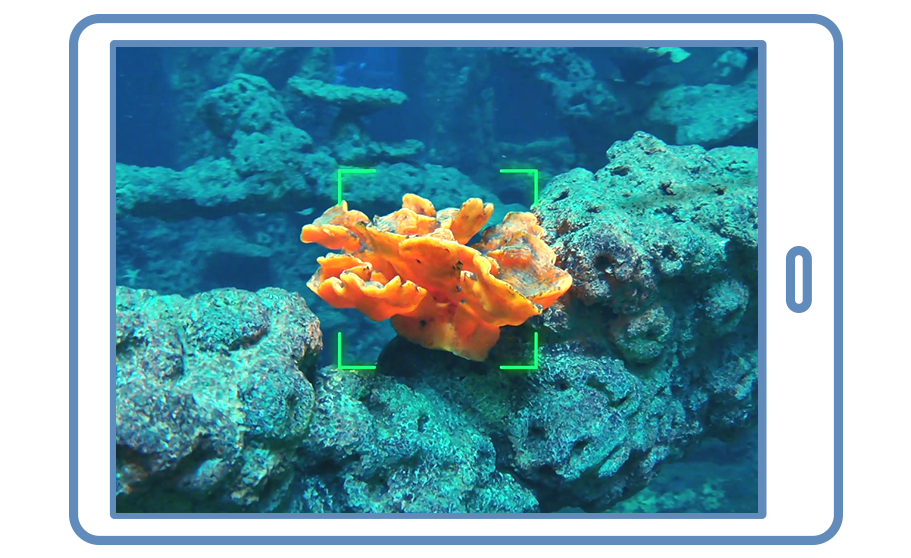
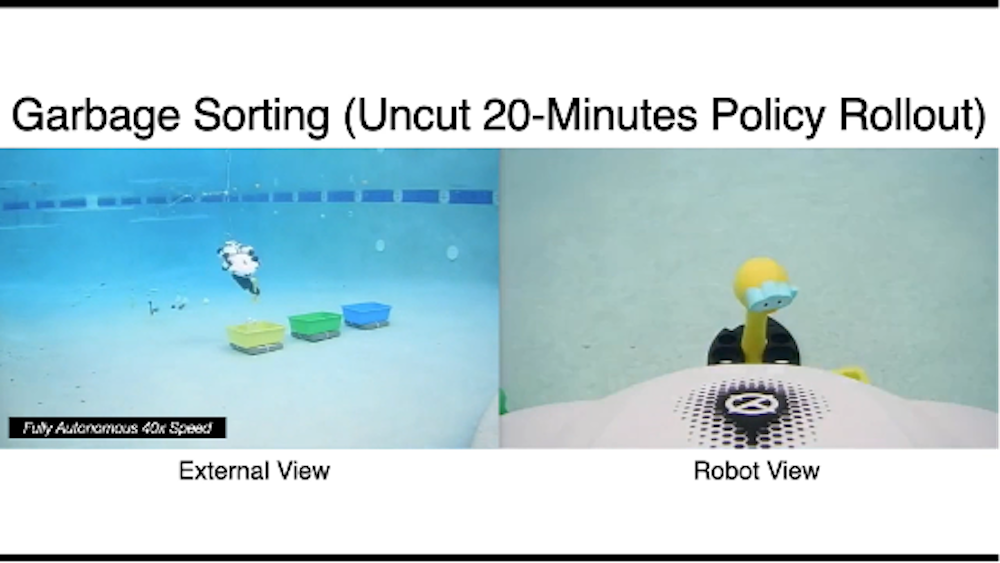
· Increased Operational Efficiency: AquaBot improved task execution speed by 41% compared to manual operations in tasks such as debris collection, target identification, and classification.
· Intelligent Decision-Making & Adaptive Learning: Integrated with advanced AI algorithms, AquaBot autonomously identifies and executes complex tasks while continuously learning and refining its performance in real-time.
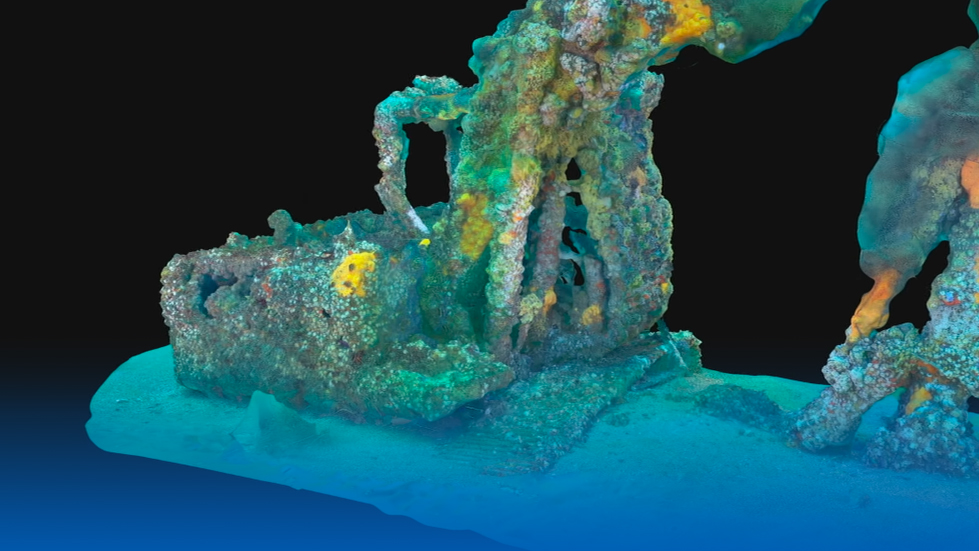
· Broad Application Potential: AquaBot’s capabilities offer highly efficient and reliable solutions for environmental conservation, aquaculture monitoring, and scientific research.

Pioneering the Future of Autonomous Underwater Exploration
The success of the AquaBot project demonstrates how the FIFISH V-EVO platform seamlessly integrates cutting-edge research with practical applications, setting a new benchmark for autonomous underwater operations. As this technology continues to evolve, it will further redefine the possibilities for underwater exploration and environmental protection.
Share: