





















Overcoming Water Flow Challenges
in Offshore Inspections
in Offshore Inspections
1970-01-01
Share:





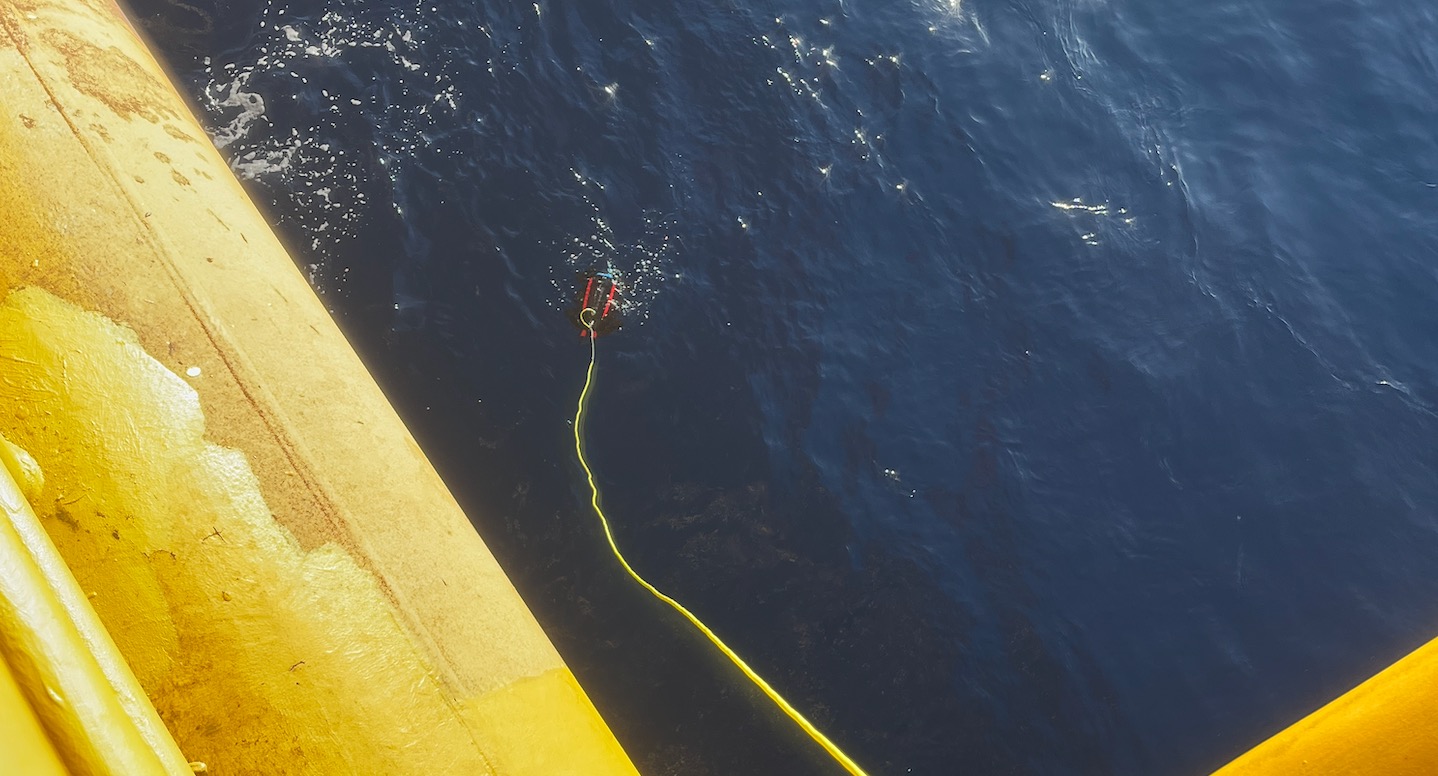
Resilient to Complex Sea Conditions: Efficient, Stable Underwater Inspections for Drilling Platforms
The FIFISH Underwater Robot is engineered for inspections in challenging marine environments, ensuring the efficient and stable assessment of offshore drilling platforms and production facilities. Even in strong currents, it continues to deliver outstanding performance.
Asia-Pacific Region
July 2024

Technical Bottlenecks of Traditional Underwater Inspection
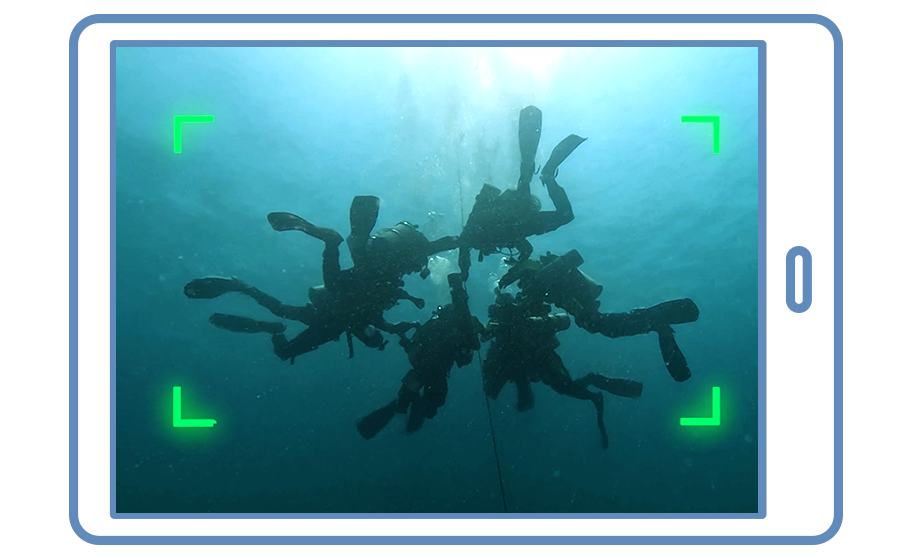
In the Asia-Pacific seas, offshore operations often face highly variable currents and extreme conditions, especially during post-typhoon emergency work. A core requirement is to evaluate the integrity of subsea structures (such as jacket legs and risers), which demands an ROV capable of navigating through tight spaces and high-risk zones—like the narrow, complex areas around platform legs and drilling equipment.
In strong currents, the ROV must maintain efficiency and stability, producing high-quality images and measurements while avoiding the risk of entanglement or damage. Traditional solutions—large or mid-sized ROVs—encounter difficulties such as cumbersome deployment, insufficient stability, lack of maneuverability, and elevated operational risks. Diving teams, meanwhile, face significant safety hazards in these harsh conditions.

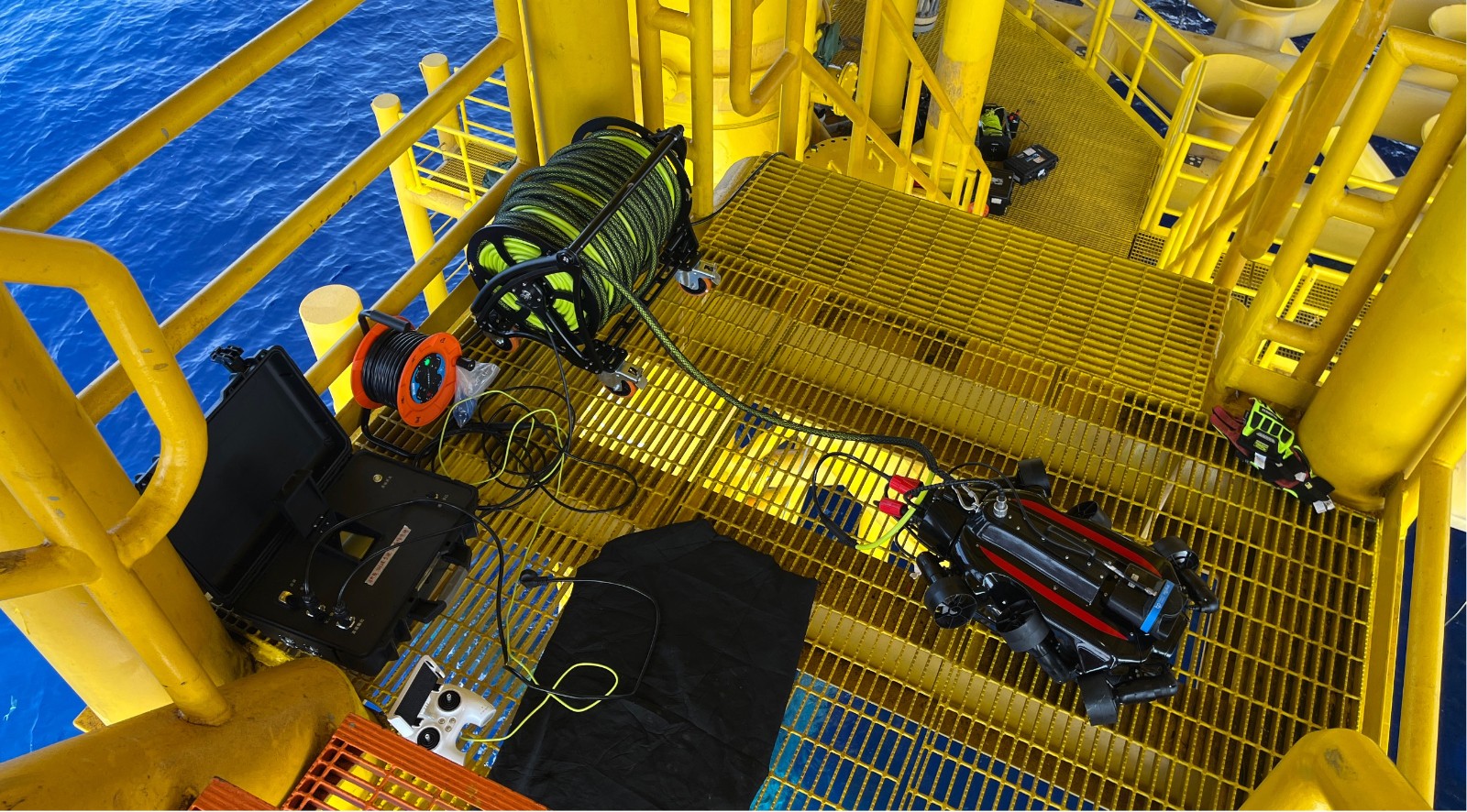

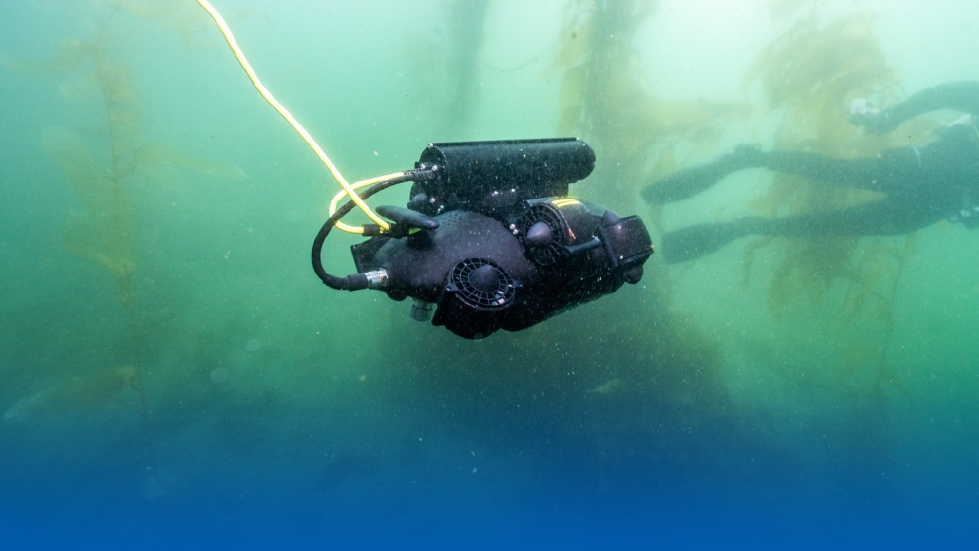
FIFISH Underwater Robot’s Core Strength: High-Stability Operations in Complex Waters
The offshore-grade FIFISH Underwater Robot features a powerful propulsion system that operates effectively in up to Sea State 4 (wave heights of around two meters), offering current resistance of approximately 4–5 knots. It can descend quickly to target locations, with a diving depth of up to 350–500 meters.
Instead of a traditional frame design, the FIFISH Offshore-Grade ROV adopts a streamlined exterior that reduces drag. Its robust motors, combined with a self-developed DVL and AI algorithms, enable fully omnidirectional, current-resistant hovering. Equipped with cutting-edge sensors, it delivers stable, clear visual inspections and sonar imaging, unaffected by shifting currents. The robot’s lightweight construction and 360° full-axis maneuverability let it approach and enter confined areas of complex underwater structures for close-up inspections.
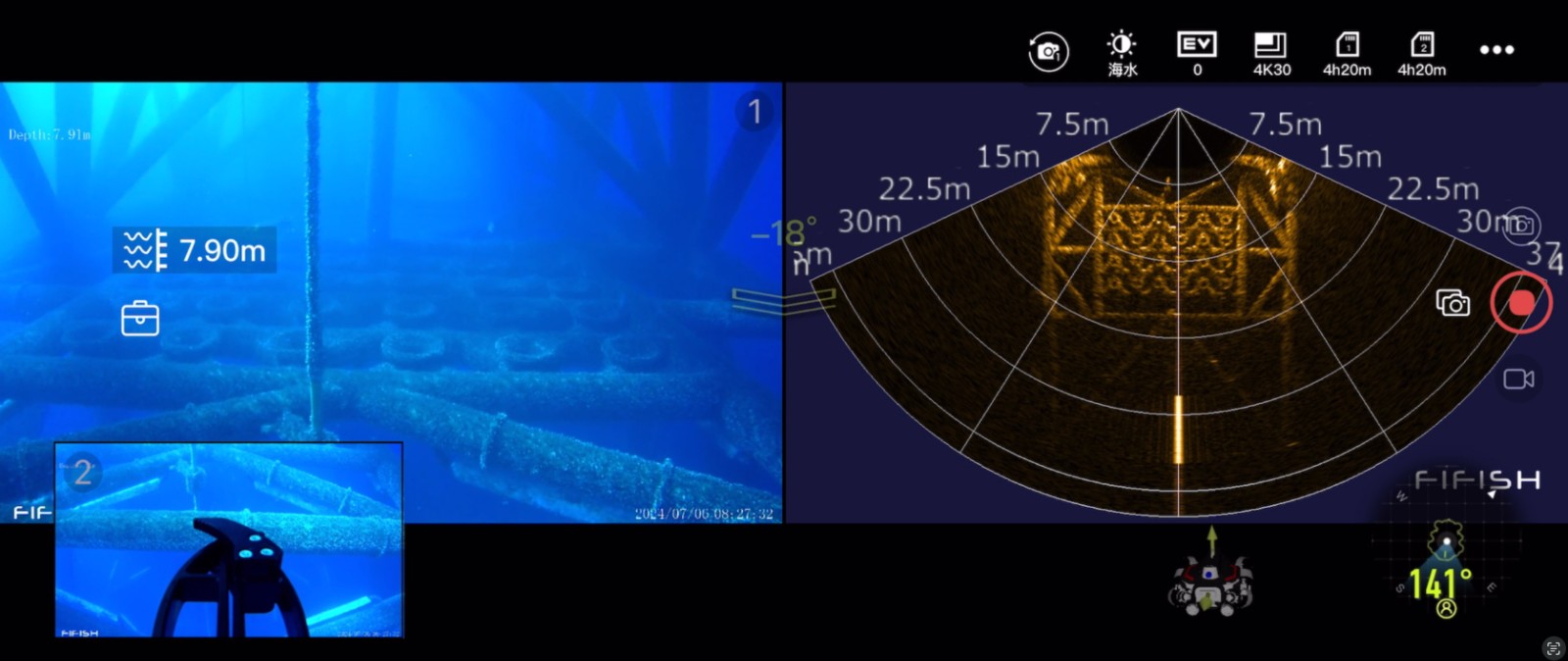
When working around the base of a jacket platform—where structural complexity and entanglement risks are high—the FIFISH ROV’s AI-based heading-lock feature ensures seamless coverage with no blind spots, boosting both operational quality and efficiency while safeguarding equipment and personnel.
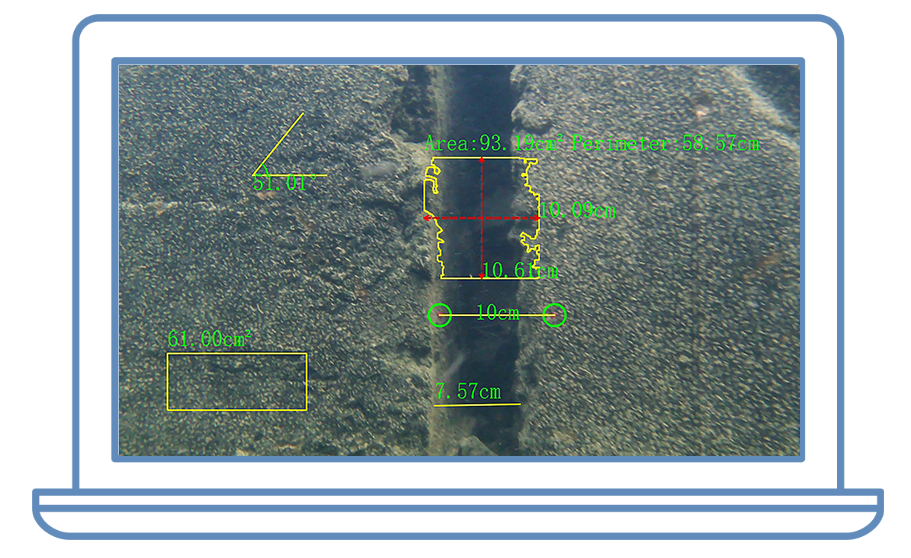
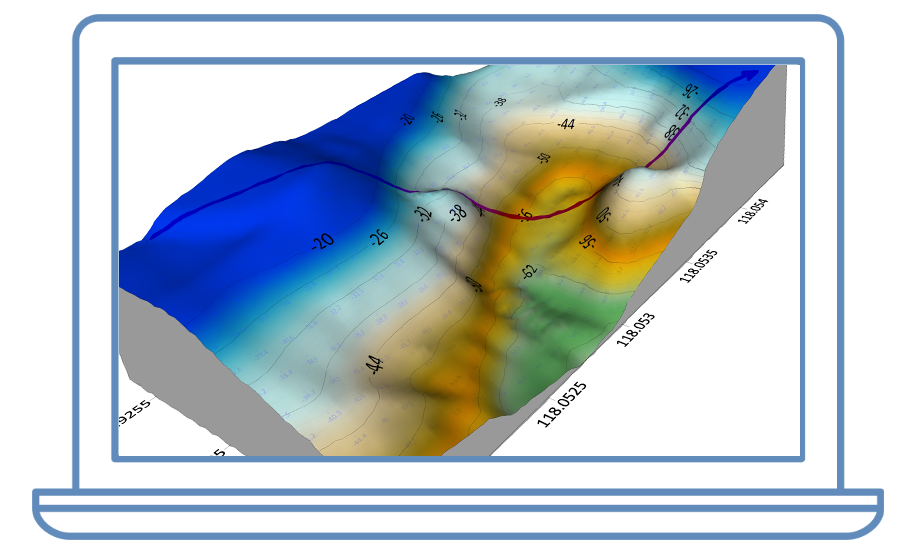
A Visual, Quantifiable, and Versatile Underwater Inspection Solution
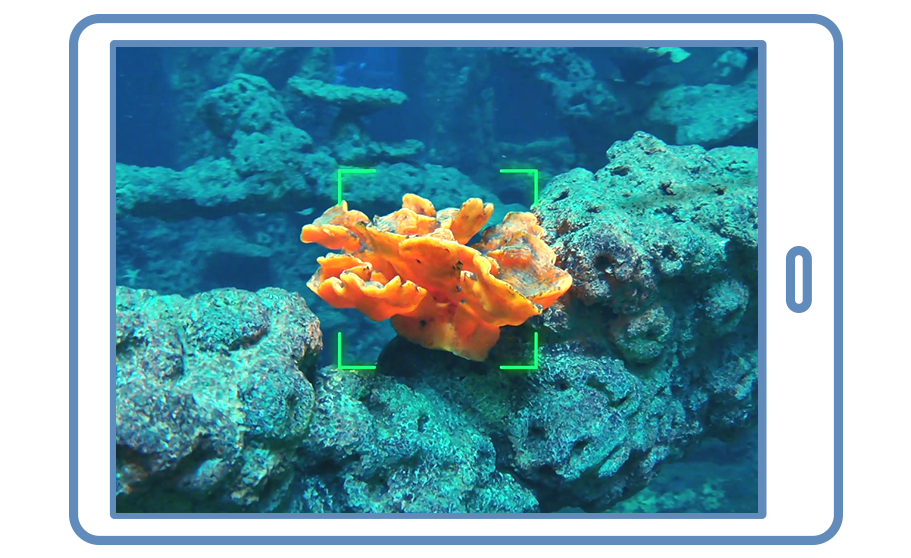
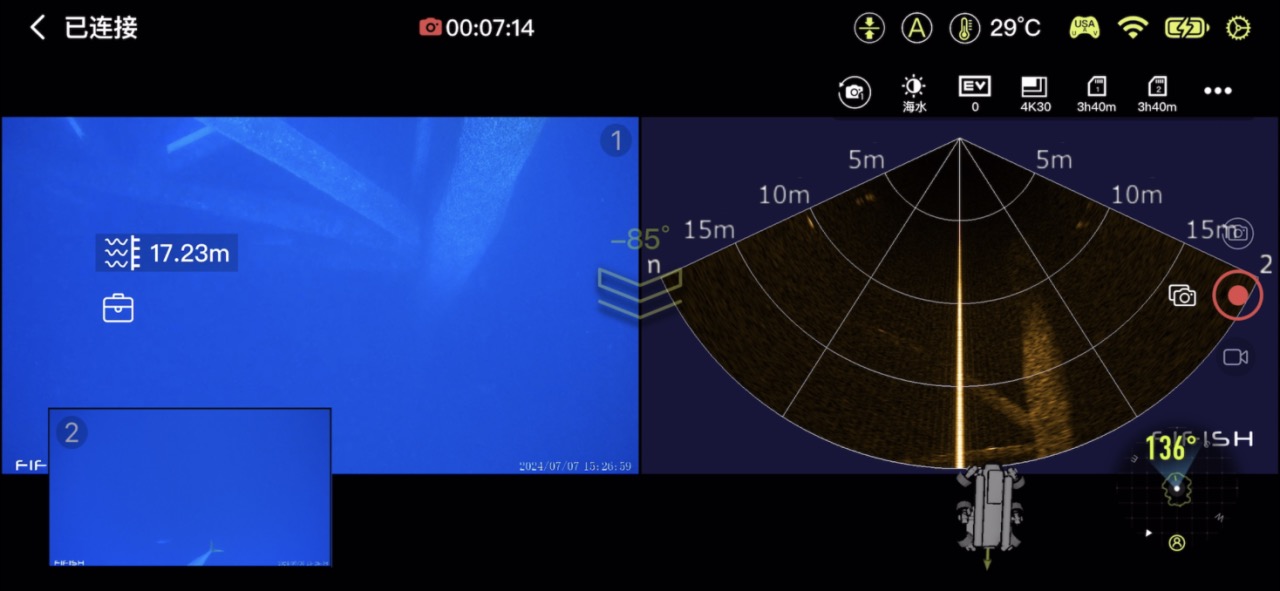
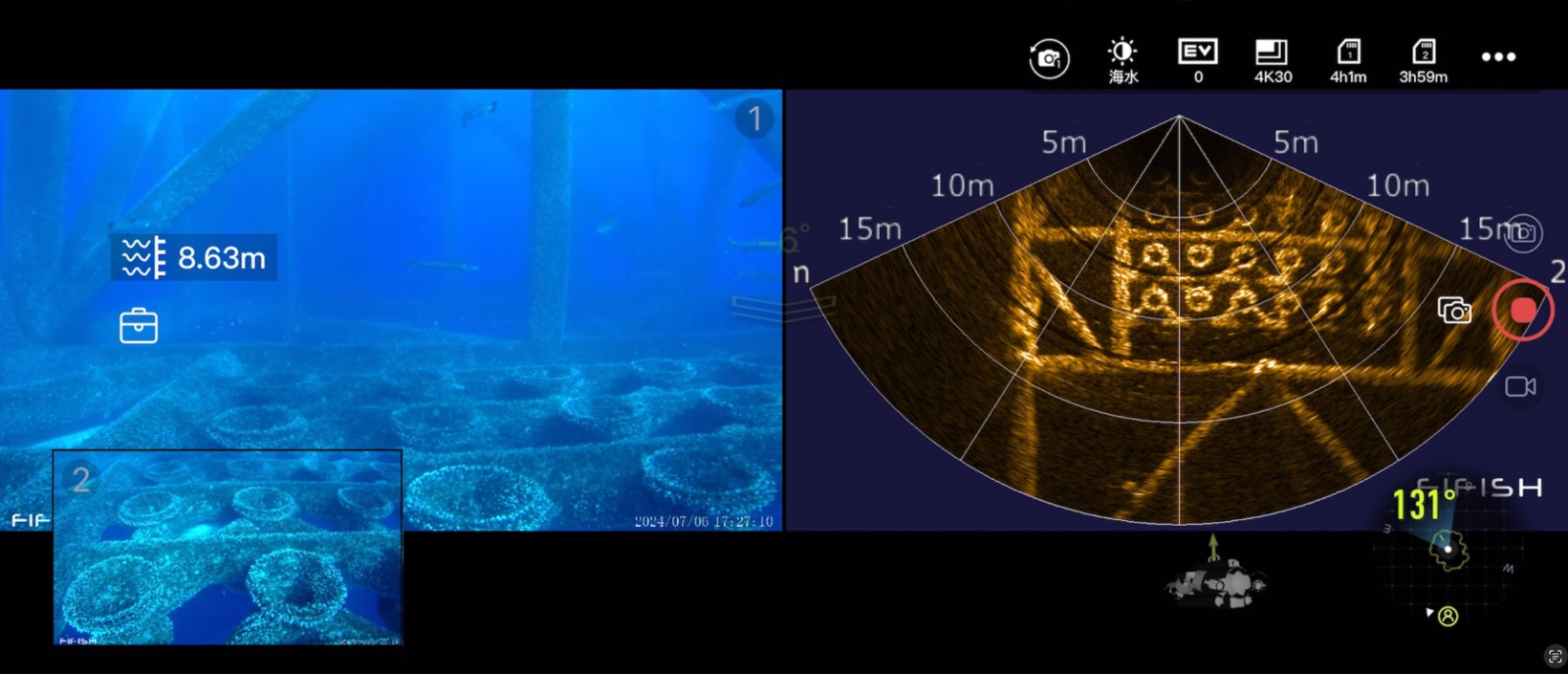
Outfitted with the QY-MT FIFISH Intelligent Measurement System, the offshore-grade FIFISH Underwater Robot supports a variety of real-time and offline measurement tasks. It precisely measures critical parameters of subsea structures—such as jacket dimensions, cracks, and corrosion levels—thereby meeting complex damage assessments and integrity evaluations.
It also carries dual 4K ultra-wide-angle cameras with 12,000-lumen lighting, and uses AI-driven algorithms to identify and filter out suspended particles (“snowflake effect”) in real time, providing clearer underwater visuals.
Compared with traditional methods, the FIFISH Underwater Robot fully demonstrates its efficient, stable, and versatile inspection capabilities in challenging offshore settings. Divers and conventional equipment are often forced to pause under strong currents, increasing operational time and risk. According to customer feedback, the FIFISH ROV reduces inspection times by up to 50%, improves safety, and mitigates operational risks in harsh conditions. By stationing a FIFISH robot on the drilling platform, operators can respond swiftly to offshore inspection needs, capitalizing on the narrow weather windows after typhoons or other emergencies.
Share: