





















Transforming Offshore Inspections
in Asia’s Power Sector
in Asia’s Power Sector
2025-01-17
Share:





Innovative Underwater Inspections for Floating Offshore Wind: Significantly Boosting Efficiency
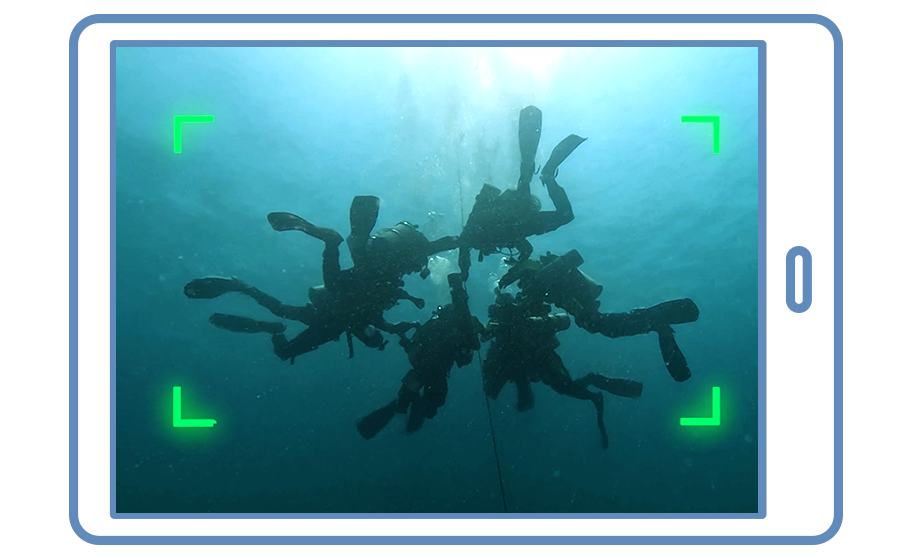
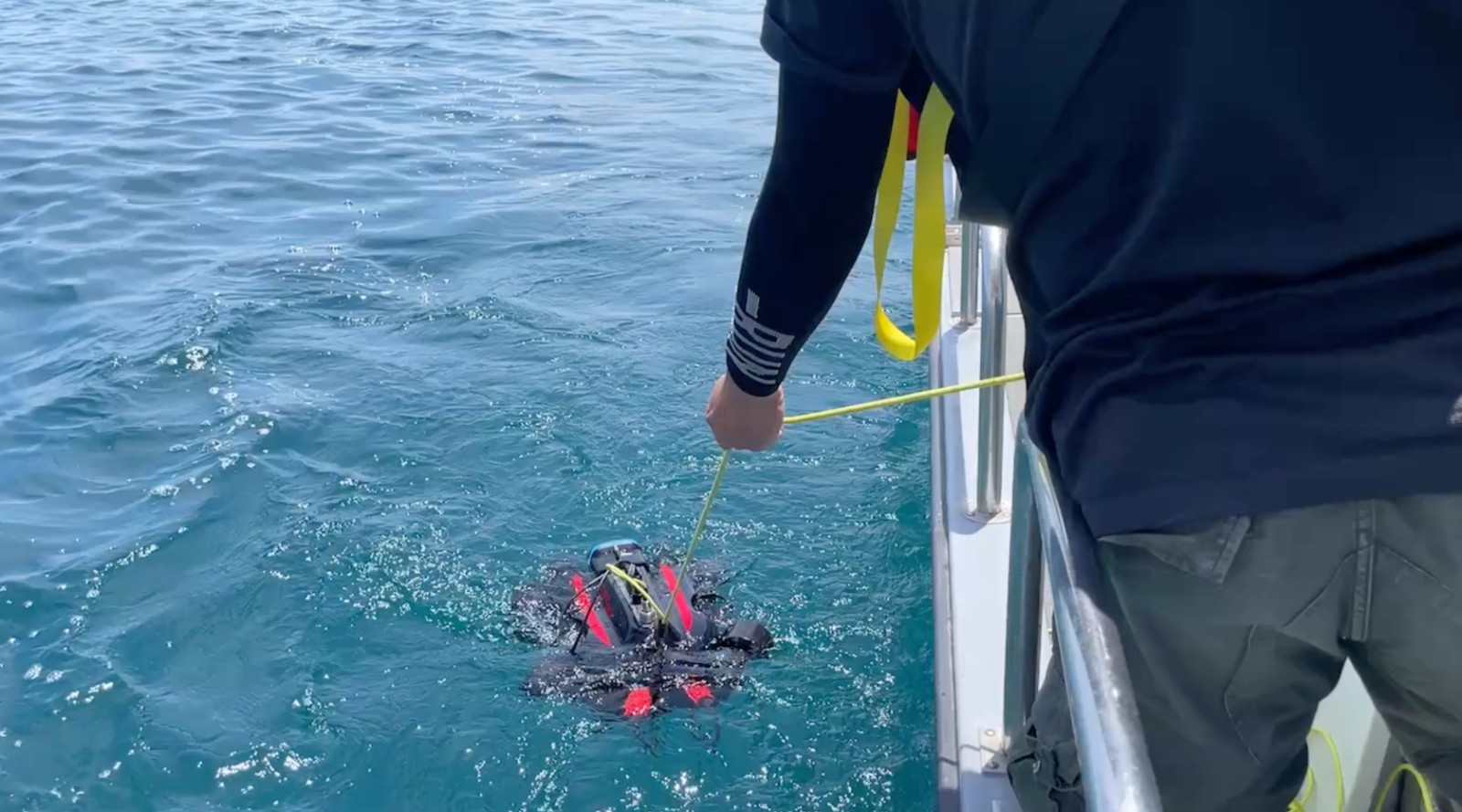
The FIFISH Underwater Robot has been successfully deployed at an offshore floating wind farm to assess subsea structural integrity. By providing real-time underwater monitoring, it efficiently identifies corrosion, seal failures, and pollution sources, substantially reducing downtime for maintenance.
Project Location: Asia-Pacific Waters
Implementation Time: September 2023

Growing Demand for Efficient Monitoring in the Floating Offshore Wind Sector
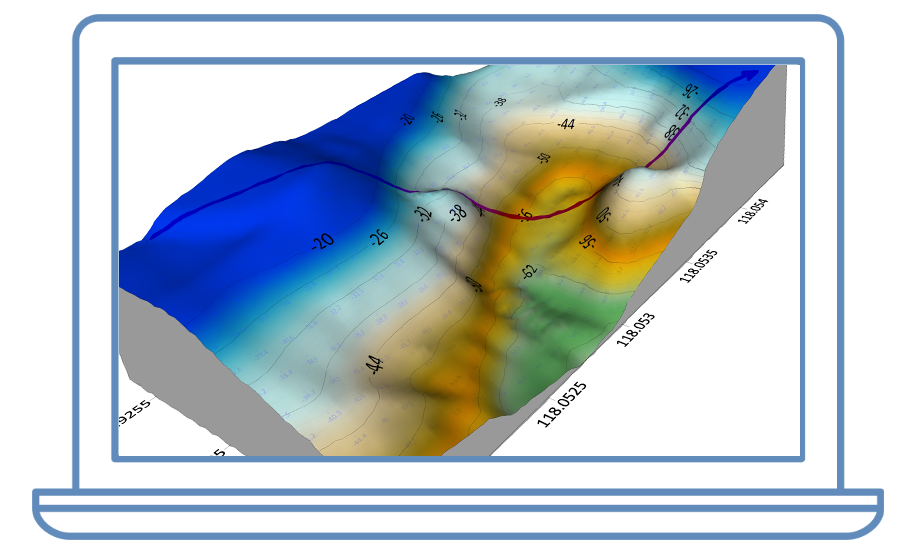
Against the backdrop of accelerated renewable energy transitions—especially for emerging offshore power sources like floating wind—operators urgently need reliable Condition Monitoring Systems (CMS). Real-time risk identification and early warnings are essential to avoid unplanned downtime (UPT) and control environmental impacts.
In one offshore wind farm, the operator faced major technical challenges in maintaining the integrity of underwater support structures and protecting the marine environment. Traditional approaches relied on diver visual inspections (DVI) and basic underwater devices (UTD), which are often time-consuming, costly, and prone to inaccuracies, making it difficult to pinpoint corrosion, leaks, or abnormal turbidity (indicating pollution). As offshore wind capacity in the Asia-Pacific region grows, the need for an efficient structural health monitoring system has become even more urgent.

FIFISH Underwater Robot: A Highly Efficient and Accurate Solution
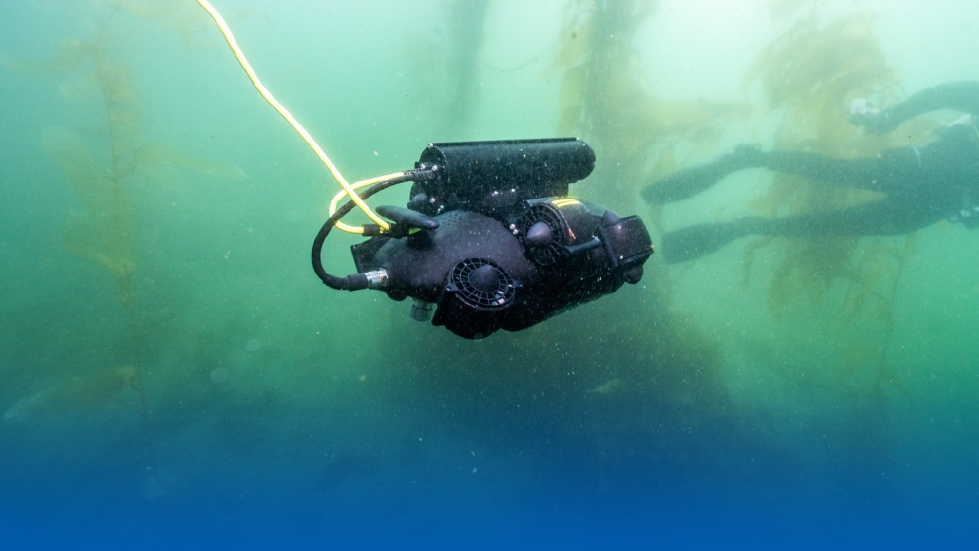
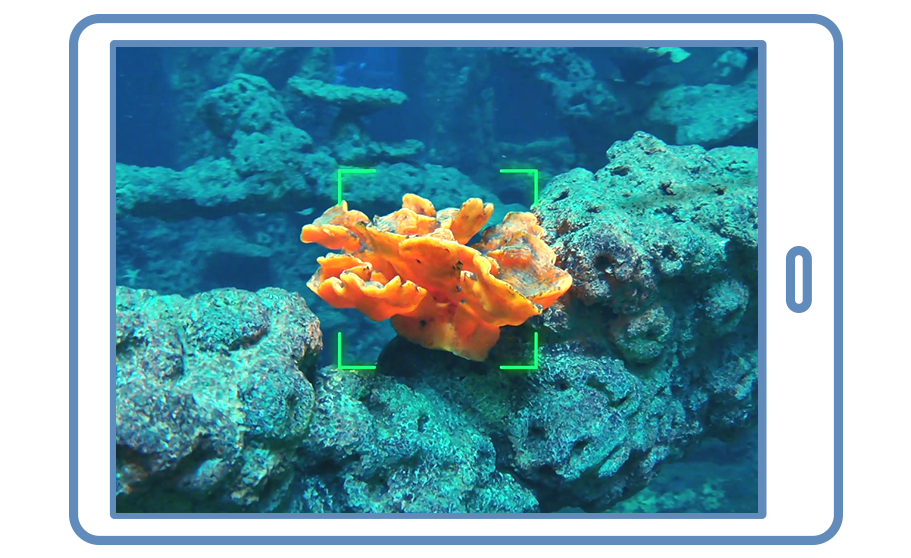
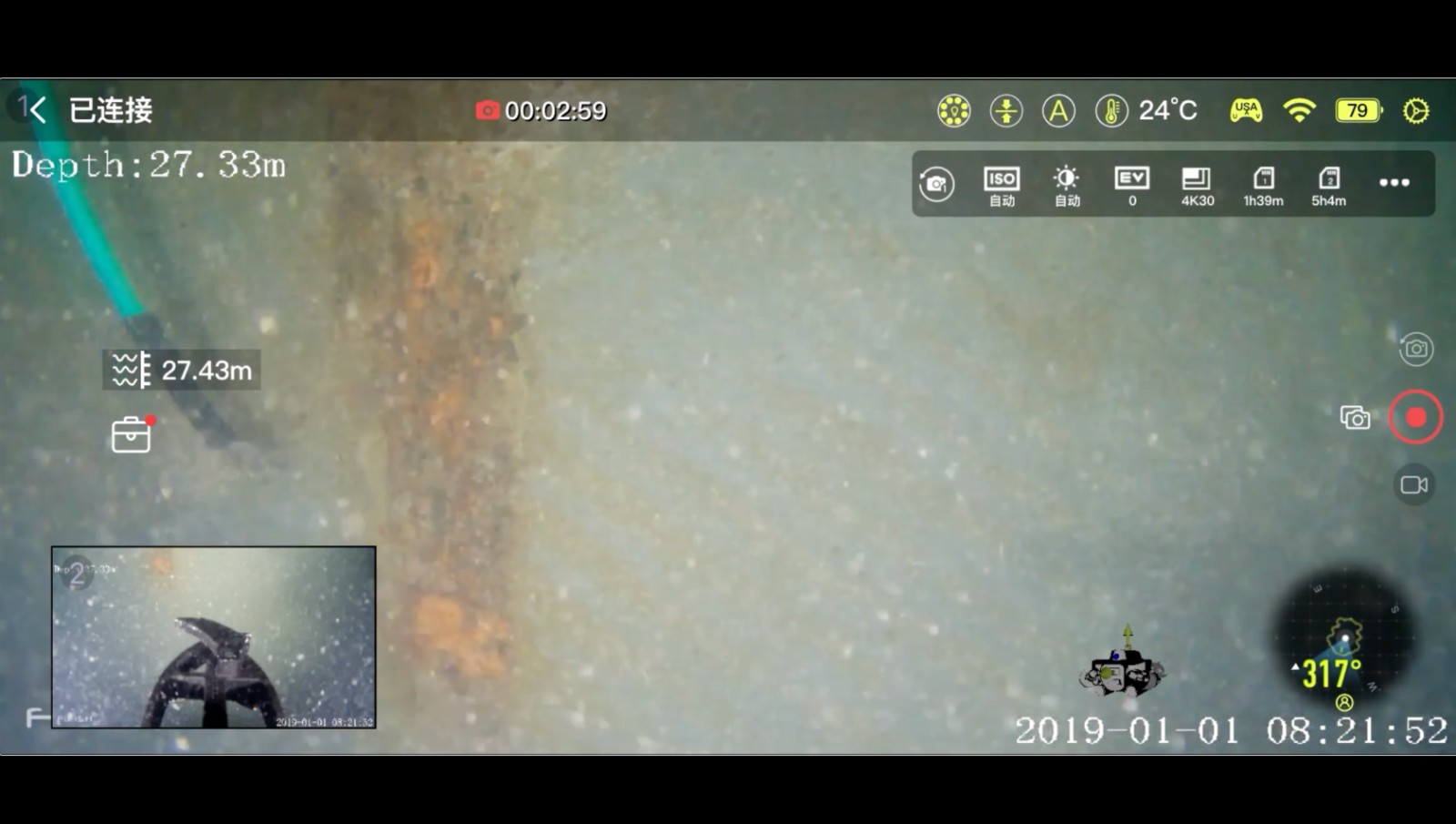
Leveraging its advanced 4K dual-camera system, the FIFISH Underwater Robot delivers crystal-clear real-time video, allowing for an unprecedented level of detail when inspecting complex subsea environments. Its omnidirectional maneuverability enables the robot to navigate easily through underwater infrastructure and access previously challenging areas, such as J-tube interfaces and grouted connection segments.
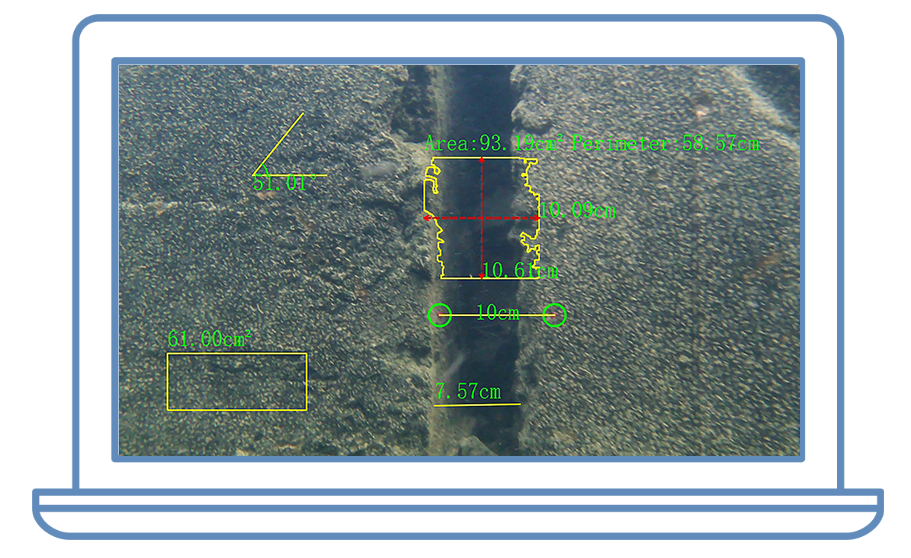
By standardizing workflows (SOP) with an intelligent ROV platform, operators can replace traditionally labor-intensive and error-prone diver-based inspections. The FIFISH Underwater Robot’s detection accuracy now reaches 98.7%, enabling swift identification of corrosion spots, leakage sites, and areas of high turbidity—all of which may signal potential pollution sources.

Industry-Leading Efficiency and Outcomes for Offshore Wind
For offshore wind clients, the FIFISH Underwater Robot significantly shortens inspection times—by up to 30%—and accelerates response to potential issues. Its high-resolution imaging system detects even minor rust spots and leaks, further refining the localization of pollution sources and elevating detection accuracy to 98.7%. Such efficiency and precision are difficult to achieve with traditional inspection methods.
By discovering underwater issues early, operators achieve safer and more efficient operations, preventing costly major repairs and mitigating risks. The FIFISH Underwater Robot’s success in floating offshore wind farms highlights its transformative impact on next-generation renewable energy projects.

Share: